Compositional Test by Differentiable Reasoning
We briefly demostrate how we can achieve compositional test by using differentiable reasoning. Suppose we have a buliding line of products in an industrial company, and the company should check if all of the necessary parts of the products are aligned in a correct manner before sending them to customers.
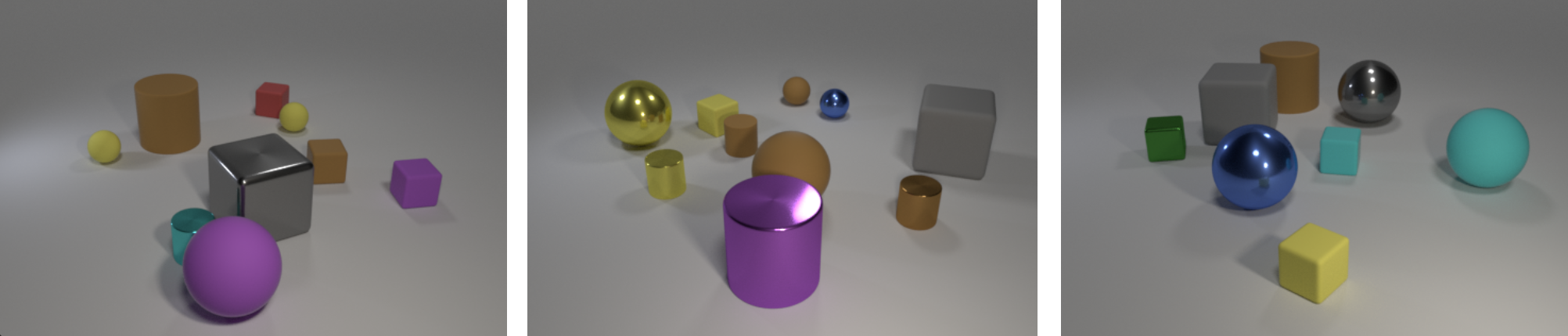
We use a 3D visual environment CLEVR to demonstrate this task. Suppose we want to compose a product which should always consist of large cube and large cylinder. Namely, the following iamges show positive cases:
from IPython.display import Image
Image('imgs/clevr/clevrhans_positive.png')
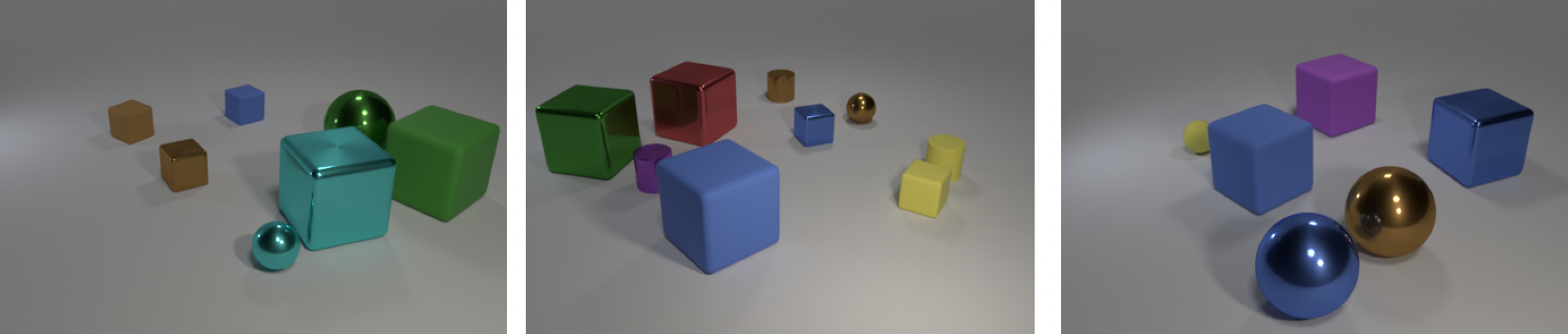
On the contrary, the following examples should be detected as negative cases, meaning that the product should be checked by humans because of the error of its compositionality of necessary parts:
Image('imgs/clevr/clevrhans_negative.png')
We realize an efficient compositionality checker from visual information as a differentiable reasoner aided by expert knowledge.
Lanuage Definition
To start writing logic programs, we need to specify a set of symbols we can use, which is called as language.
We define language in text files in
data/lang/dataset-type/dataset-name/. ### Predicates Predicates are
written in preds.txt file. The format is name:arity:data_types.
Each predicate should be specified line by line. For example,
kp:1:image
Neural Predicates
Neural predicates are written in neural_preds.txt file. The format
is name:arity:data_types. Each predicate should be specified line by
line. For example,
in:2:object,image
color:2:object,color
shape:2:object,shape
size:2:object,size
material:2:object,material
Valuation functions for each neural predicate should be defined in
valuation_func.py and be registered in valuation.py.
Constants
Constants are written in consts.txt. The format is
data_type:names. Each constant should be specified line by line. For
example,
object:obj0,obj1,obj2,obj3,obj4,obj5,obj6,obj7,obj8,obj9
color:cyan,blue,yellow,purple,red,green,gray,brown
shape:sphere,cube,cylinder
size:large,small
material:rubber,metal
image:img
The defined language can be loaded by logic_utils.get_lang.
# Load a defined language
import sys
sys.path.append('src/')
from src.logic_utils import get_lang
lark_path = 'src/lark/exp.lark'
lang_base_path = 'data/lang/'
lang, _clauses, bk_clauses, bk, atoms = get_lang(
lark_path, lang_base_path, 'clevr', 'clevr-hans0')
Specify Hyperparameters
import torch
class Args:
dataset_type = 'clevr'
dataset = 'clevr-hans0'
batch_size = 2
num_objects = 6
no_cuda = True
num_workers = 4
program_size = 1
epochs = 20
lr = 1e-2
infer_step = 3
term_depth = 2
no_train = False
plot = False
small_data = False
args = Args()
device = torch.device('cpu')
Writing Logic Programs
By using the defined symbols, you can write logic programs, for example,
kp(X):-in(O1,X),in(O2,X),size(O1,large),shape(O1,cube),size(O2,large),shape(O2,cylinder).
Clauses should be written in clauses.txt or bk_clauses.txt.
# Write a logic program as text
clauses_str = """
kp(X):-in(O1,X),in(O2,X),size(O1,large),shape(O1,cube),size(O2,large),shape(O2,cylinder).
"""
# Parse the text to logic program
from fol.data_utils import DataUtils
du = DataUtils(lark_path, lang_base_path, args.dataset_type, args.dataset)
clauses = []
for line in clauses_str.split('\n')[1:-1]:
clauses.append(du.parse_clause(line, lang))
clauses = [clauses[0]]
Build a Reasoner
Import the neuro-symbolic forward reasoner.
from percept import SlotAttentionPerceptionModule, YOLOPerceptionModule
from valuation import SlotAttentionValuationModule, YOLOValuationModule
from facts_converter import FactsConverter
from nsfr import NSFReasoner
from logic_utils import build_infer_module, build_clause_infer_module
import torch
PM = SlotAttentionPerceptionModule(e=args.num_objects, d=11, device=device)
VM = SlotAttentionValuationModule(
lang=lang, device=device)
FC = FactsConverter(lang=lang, perception_module=PM,
valuation_module=VM, device=device)
IM = build_infer_module(clauses, bk_clauses, atoms, lang,
m=1, infer_step=3, device=device, train=False)
CIM = build_clause_infer_module(clauses, bk_clauses, atoms, lang,
m=len(clauses), infer_step=3, device=device)
# Neuro-Symbolic Forward Reasoner
NSFR = NSFReasoner(perception_module=PM, facts_converter=FC,
infer_module=IM, clause_infer_module=CIM, atoms=atoms, bk=bk, clauses=clauses)
Pretrained neural predicates have been loaded!
Load Data
from nsfr_utils import get_data_loader # get torch data loader
import matplotlib.pyplot as plt
train_loader, val_loader, test_loader = get_data_loader(args)
from train import predict
acc_th = predict(NSFR, train_loader, args, device, th=0.2)
print('Accuracy: ', acc_th[0])
27it [00:22, 1.17it/s]
Accuracy: 0.9629629629629629
By performing differentiable reasoning on visual scenes, the task of compositional test can be solved efficiently by alphaILP.